
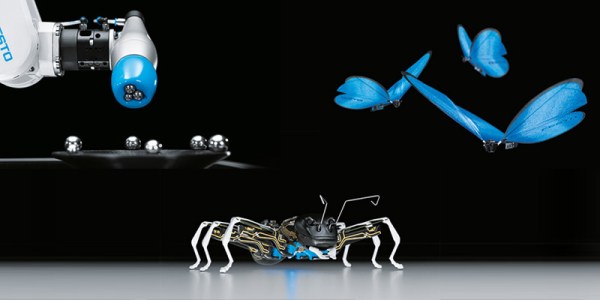
ถ้าเราพูดถึง Festo เป็นบริษัทด้านอุปกรณ์สำหรับระบบอัตโนมัติในโรงงาน เช่น อุปกรณ์นิวเมติก ชุดควบคุมมอเตอร์ เป็นต้น ในด้านการวิจัยและพัฒนา Festo มีโครงการ Bionic Learning Network เป็นการวิจัยร่วมกับมหาวิทยาลัยต่าง ๆ ในการนำเทคนิคจากธรรมชาติมาพัฒนาเป็นเทคโนโลยีใหม่ ๆ (แน่นอนว่าใช้ผลิตภัณฑ์ของ Festo) ปีที่แล้วมีผลงานเป็นหุ่นยนต์จิงโจ้ ปีนี้มีผลงานเป็นหุ่นยนต์มด ผีเสื้อ และมือจับเลียนแบบลิ้นกิ้งก่า เริ่มที่ BionicANTs หุ่นยนต์มด(ยักษ์) ที่เลียนแบบพฤติกรรมการทำงานร่วมกันของมดจริง ๆ BionicANTs แต่ละตัวยาว 13.5 เซนติเมตร หนัก 105 กรัม ถูกสร้างจากการพิมพ์สามมิติ ทั้งโครงสร้างทางกลที่ใช้การพิมพ์แบบ laser sintering วงจรไฟฟ้าที่เห็นเป็นลายเส้นก็ใช้การพิมพ์สามมิติเช่นกัน BionicANTs มีกล้องคู่ด้านหน้าสามารถมองภาพเป็นสามมิติเพื่อตรวจจับวัตถุและระบุตำแหน่งตนเอง มี optical sensor แบบที่ใช้ในเมาส์ เพื่อวัดการเคลื่อนที่ ในส่วนการเคลื่อนที่ ใช้ actuator แบบ piezo ceramic (เป็นวัสดุที่สามารถยืด หดได้ หากมีการจ่ายไฟฟ้าแรงดันสูงเข้าไป สามารถเคลื่อนที่ได้เร็ว เงียบ มีใช้ในกลไกการโฟกัสในกล้อง) หนวดใช้ในการประจุไฟฟ้า BionicANTs เลียนแบบมดจริง ๆ โดยการทำตามกฎง่าย ๆ หลาย ๆ ข้อ และสื่อสารทำงานร่วมกับตัวอื่น ๆ ได้ ทำให้ทำต่อด้วย eMotion Butterflies หุ่นยนต์ผีเสื้อพริ้วไหว ขนาดความกว้างปีก 50 เซนติเมตร ควบคุมปีก 2 ข้างอิสระต่อกันด้วยมอเตอร์ 2 ตัว มี IMU 9 แกน (accelerometer, gyro, compass) ใช้พลังงานจากแบตเตอรี่ลิเธียมโพลิเมอร์ มีน้ำหนักเพียง 32 กรัมเท่านั้น ขยับปีกด้วยความถี่ 1-2 ครั้งต่อวินาที บินได้เร็ว 2.5 เมตรต่อวินาที บินได้ 3-4 นาทีก่อนที่จะต้องประจุไฟ 15 นาที eMotion Butterflies รู้ตำแหน่งตัวเองในอาคารด้วยการติดตั้งหลอดไฟอินฟราเรด 2 ดวงไว้ที่ลำตัว และติดตั้งกล้องความเร็วสูง 160 เฟรมต่อวินาที 10 ตัวไว้รอบ ๆ พื้นที่เพื่อจับตำแหน่งไฟอินฟราเรดงานที่ซับซ้อนได้ ต่อด้วย eMotion Butterflies หุ่นยนต์ผีเสื้อพริ้วไหว ขนาดความกว้างปีก 50 เซนติเมตร ควบคุมปีก 2 ข้างอิสระต่อกันด้วยมอเตอร์ 2 ตัว มี IMU 9 แกน (accelerometer, gyro, compass) ใช้พลังงานจากแบตเตอรี่ลิเธียมโพลิเมอร์ มีน้ำหนักเพียง 32 กรัมเท่านั้น ขยับปีกด้วยความถี่ 1-2 ครั้งต่อวินาที บินได้เร็ว 2.5 เมตรต่อวินาที บินได้ 3-4 นาทีก่อนที่จะต้องประจุไฟ 15 นาที eMotion Butterflies รู้ตำแหน่งตัวเองในอาคารด้วยการติดตั้งหลอดไฟอินฟราเรด 2 ดวงไว้ที่ลำตัว และติดตั้งกล้องความเร็วสูง 160 เฟรมต่อวินาที 10 ตัวไว้รอบ ๆ พื้นที่เพื่อจับตำแหน่งไฟอินฟราเรด ปิดท้ายด้วยมือจับของสารพัดเลียนแบบลิ้นกิ้งก่า กิ้งก่าสามารถจับเหยื่อได้ด้วยการห่อลิ้นครอบเหยื่อ มือจับ FlexShapeGripper เลียนแบบการกระทำเช่นนั้นโดยใช้ลูกโป่งซิลิโคนที่ยืดหยุ่นได้ และบังคับให้เปลี่ยนรูปร่างตามวัตถุด้วยการสูบน้ำเข้า-ออกลูกโป่ง ทำให้สามารถใช้มือจับเพียงแบบเดียวจับของได้หลากหลายรูปร่าง
www.thairobotics.com/2015/04/07